기술 의사결정 중심 소통
막연한 요구를 측정 가능한 스펙으로 번역하고, 구현 가능성과 리스크를 검토한 뒤 착수합니다. 영업 담당이 아닌 엔지니어가 직접 답합니다.
흔들리는 차량·선박 위 드론 착륙, 10m 거리 0.05° 자세 측정, 360° 전방향 트레드밀 — 카탈로그 제품으로는 풀리지 않는 문제들입니다. AEYES는 기구 설계부터 자율주행, 비전, 제어 소프트웨어까지 한 팀에서 통합해, 데모가 아니라 실제 현장에서 동작하는 시스템으로 완성합니다.

기능별로 외주를 나누면 인터페이스에서 일정이 무너집니다. AEYES는 시스템 전체를 한 팀이 설계해 현장 적용까지의 단절을 없앱니다.
프로젝트를 살리는 것은 영업 멘트가 아니라 정확한 기술 판단입니다. AEYES는 요구사항 정의부터 구현, 검증, 현장 반영까지 모든 결정을 기술 근거 위에서 내립니다.
까다로운 검증 기준을 가진 국책 연구기관들이 AEYES를 선택했습니다. 공개 가능한 사례 기준입니다.
사양서를 받아 그대로 만드는 외주가 아니라, 문제 정의부터 함께합니다. 로봇이 실제로 동작하기 위해 필요한 하드웨어, 제어, 비전, 주행 로직을 하나의 구조로 설계합니다.
막연한 요구를 측정 가능한 스펙으로 번역하고, 구현 가능성과 리스크를 검토한 뒤 착수합니다. 영업 담당이 아닌 엔지니어가 직접 답합니다.
기구 설계부터 전장, 임베디드 제어, 자율주행, 비전, UI까지 한 팀이 만듭니다. 외주를 쪼갤 때 생기는 인터페이스 공백이 없습니다.
실험실 데모는 시작일 뿐입니다. 진동, 조도 변화, 공간 제약 같은 실제 운용 조건에서의 검증을 완성 기준으로 삼습니다.
프로젝트 성격에 따라 하드웨어, 주행 알고리즘, 비전, 제어 소프트웨어를 조합해 목적에 맞는 로봇 시스템을 설계하고 구현합니다.
이동체, 실험 플랫폼, 특수 목적 장비의 구조 설계부터 전장 통합까지 수행합니다.
산업용 카메라와 딥러닝, 고전 비전 기법을 결합해 제품 검사와 자세 측정 시스템을 설계합니다.
장비 제어용 UI, 임베디드 제어기, ROS2 노드, 통신 프로토콜을 통합해 운영 가능한 체계를 구축합니다.
요구사항의 모호함이 커질수록 일정과 품질 리스크가 커집니다. AEYES는 문제를 구조화하고 구현 범위를 명확히 정리하는 방식으로 프로젝트를 진행합니다.
적용 환경, 목표 성능, 인터페이스, 일정 제약을 정리해 실제 과업 범위를 설정합니다.
기구, 센서, 제어 구조, 비전 파이프라인, 주행 로직을 통합한 아키텍처를 수립합니다.
프로토타입 제작, 알고리즘 적용, UI 개발, 통합 테스트를 통해 요구 성능을 검증합니다.
운용 조건에 맞춘 파라미터 조정과 개선 작업을 수행하며 추가 고도화 방향을 제안합니다.
말보다 결과물이 정확합니다. 공개 가능한 범위에서 선별한 대표 사례이며, 모두 실제 동작 영상으로 확인하실 수 있습니다.
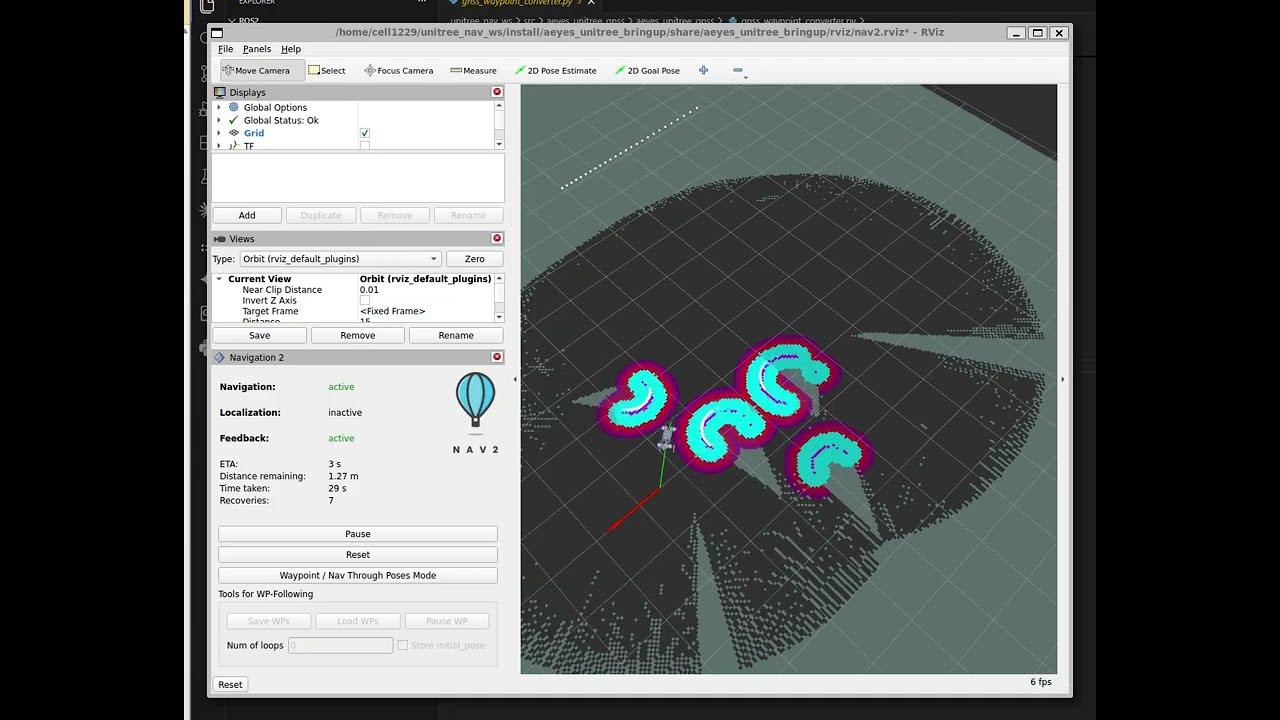 내비게이션 알고리즘
내비게이션 알고리즘ROS2 Nav2 기반으로 5종의 장애물 회피 알고리즘을 동일 환경에서 비교 검증한 사례입니다. 동적 장애물 조건에서 경로 추종과 회피 성능을 분석해 현장에 맞는 최적의 컨트롤러를 선정합니다.
 영상 기반 사례
영상 기반 사례고정밀 IMU 센싱과 모션 예측 알고리즘을 통해 흔들리는 차량이나 선박 위에서도 드론이 안정적으로 착륙할 수 있도록 설계한 스마트 랜딩 패드입니다.
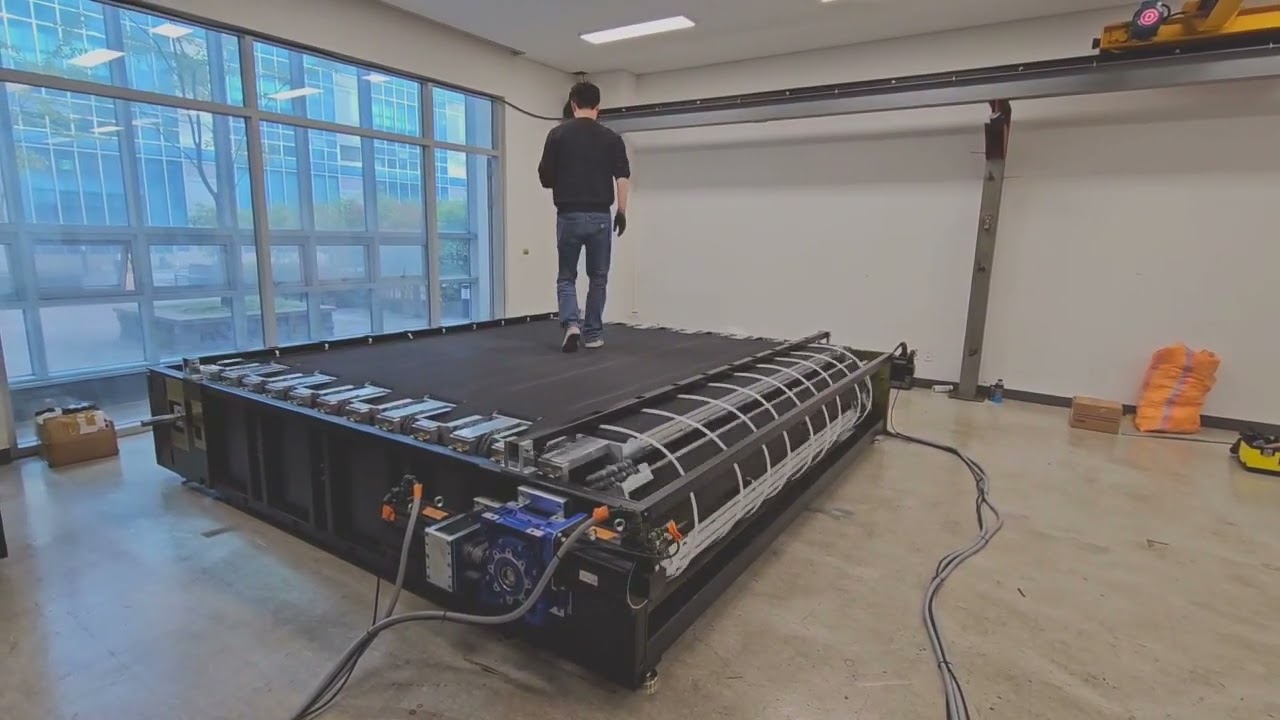 인터랙션 플랫폼
인터랙션 플랫폼사용자의 보행 의도를 예측해 360도 모든 방향의 움직임을 수용하는 트레드밀 시스템입니다. 고속 모션 캡처와 다축 서보 제어를 융합했습니다.
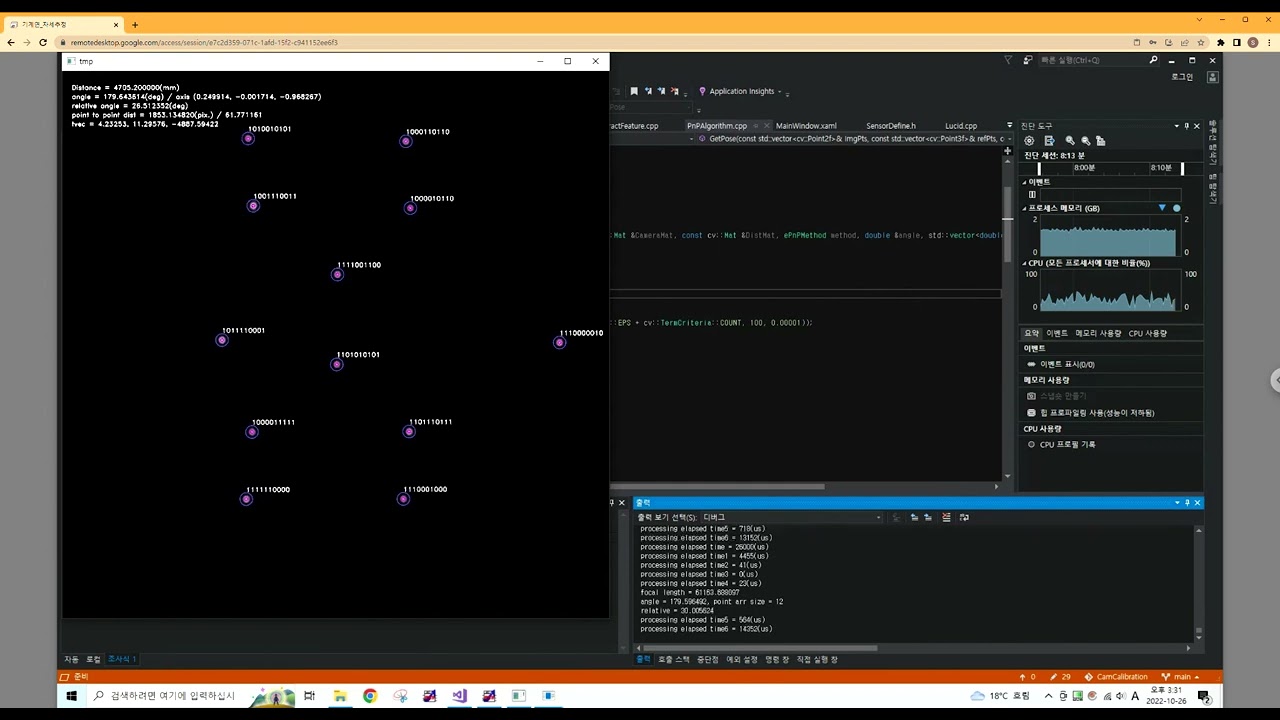 정밀 측정 시스템
정밀 측정 시스템10m 거리에서 타겟의 3차원 자세를 0.05도 정밀도로 측정하는 광학 시스템입니다. 독자적인 마커 설계와 EKF 기반 추정을 적용했습니다.
 자율주행 플랫폼
자율주행 플랫폼실내 측위 시스템과 자율주행 로직을 통합해 좁은 공간에서도 유연하게 이동하는 매카넘 휠 기반 로봇 플랫폼입니다.
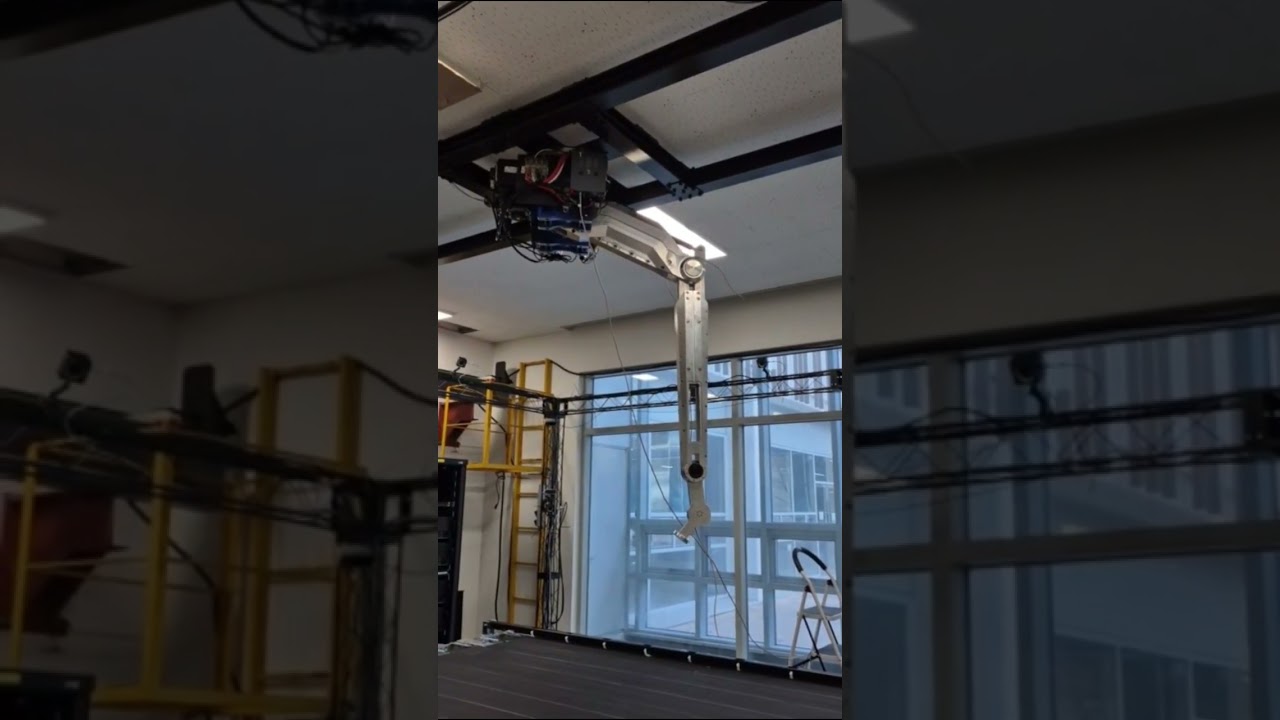 매니퓰레이터 시스템
매니퓰레이터 시스템정밀 위치 제어와 고하중 대응을 동시에 고려한 4축 로봇 시스템으로, 반복 하중 조건을 반영한 구조 설계가 핵심입니다.
 추종 이동체
추종 이동체초음파와 LiDAR 센서를 융합해 사용자를 추종하고 장애물을 회피하는 이동체로, 센서 퓨전과 추종 제어가 결합된 사례입니다.
프로젝트 목적, 운용 환경, 필요한 기능, 목표 성능을 간단히 정리해 보내주시면 초기 검토와 협업 범위 제안이 훨씬 빠르게 진행됩니다.
아이디어 단계여도 괜찮습니다. 연구 과제, 시제품 개발, 자동화 장비, 자율주행 플랫폼, 비전 검사 시스템 — 어떤 단계의 프로젝트든 엔지니어가 직접 검토하고 현실적인 접근 방식을 제안해 드립니다.